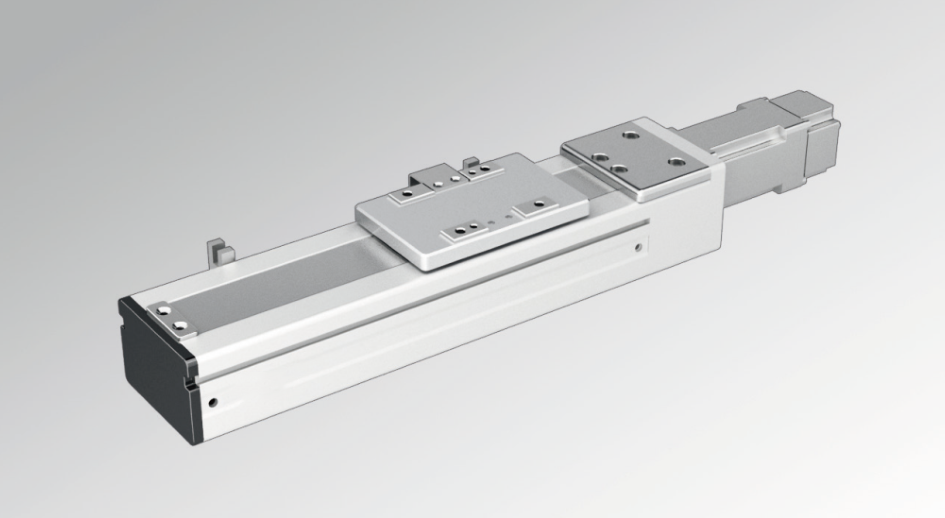
介绍坐标机械手的两种控制方式
电机控制和气动控制是坐标机械手最常见的两种控制方式。
由于坐标机械手在横移方向上的行程较大,且X、Z方向上的重量全部集中在这个方向的自由度上,因而负载较重,速度也较高,实验证明如果采用汽缸驱动的话,会出现汽缸密封圈泄漏的情况,无法满足实际使用要求工况,因此需要采用步进电机配合使用联轴器丝杆传动的驱动方式,而且这种驱动方式能够有效地调节坐标机械手运行速度以及坐标机械手的定位精度。
在这种情况下还能够较大程度上减小误差,提高坐标机械手的重复精度,从而使整套坐标机械手系统具有更高的可靠性和更高的运行效率。驱动电机控制系统由脉冲信号、信号分配、功率放大、步进电机组成,其中脉冲信号由PLC产生,通过信号分配再经过功率放大驱动步进电机带动负载工作。
为了使驱动电机运行速度平稳和能够达到更高的定位精度,控制系统必须对步进电机的升降速过程进行严格精密的控制,是根据步进电机的矩频特性曲线以及实际情况,能够更好的结合驱动电机自身的动力特性,满足步进电机加减速运动的规律要求,能够充分利用驱动电机的有效转矩,快速响应性能较好,升降速时间较短,能够获得很好的实际效果。
对电机控制和气动控制进行优选,能够使坐标机械手达到更高的定位精度,从而能够提高坐标机械手运行的可靠性和效率。
下一篇:静音直线模组的优势